Mecanum Wheeled Mobile Robot
Haoran Chen. Supervised by Prof. Yujiang Zeng.
In this project, we designed and implemented a platform for a Mecanum wheeled mobile robot, including signal control of hardware units and logical control of ROS nodes with remote display. The system includes SLAM algorithms (gmapping and cartographer). We evaluated the mapping quality for indoor scenes.
Main Contributions
- Designed and implemented control units and communication protocol on STM32 and CPU;
- Integrated both Gmapping and Cartographer algorithms into our robot platform;
- Measured and evaluated the uncertainties of SLAM algorithms for indoor environments.
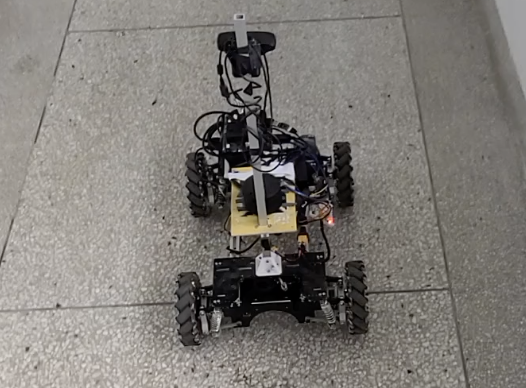
Mecanum wheeled robot