
Large Scale 3D Reconstruction with GPS data
Haoran Chen. Supervised by Silvan Weder and Dr. Mihai Dusmanu.
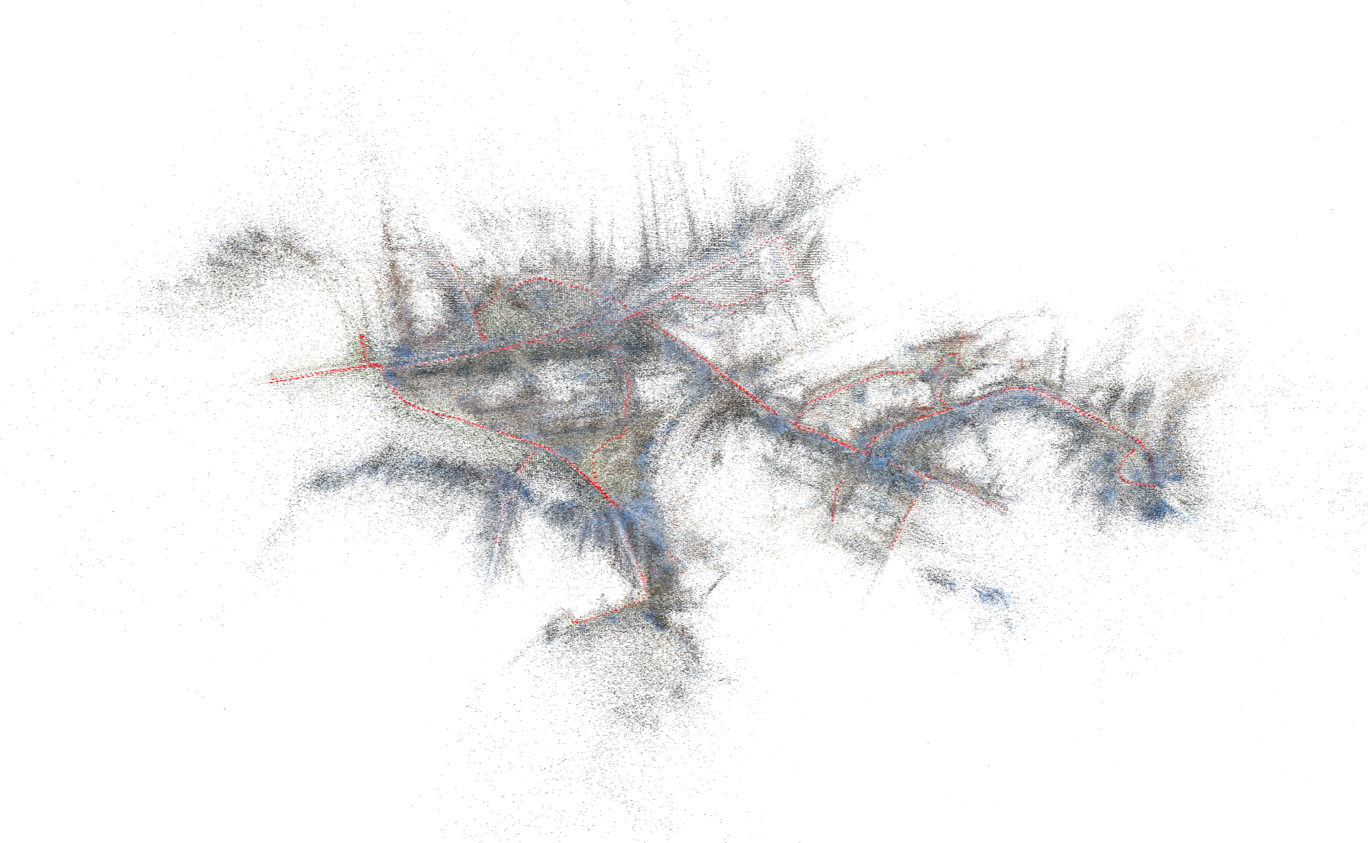
In this project, we focused on recovering metric when using structure-from-motion, and proposed a GPS-based localization method to improve the retrieval efficiency and optimize large scale scene reconstruction.
Abstract
“Structure-from-motion is one of the most powerful tools for 3D reconstruction. While many methods have been proposed to improve the quality of 3D reconstructions in terms of accuracy, robustness, completeness and efficiency, there is still a remaining problem of scale ambiguity in Structure-from-Motion. In this project, we reconstruct the 3D structures of neighborhoods and aim to recover the metric with prior knowledge of GPS data when recording the videos. We propose a GPS-based localization method to improve the retrieval efficiency and optimize our reconstructions using Pose-Graph-Optimization.”
Main Contributions
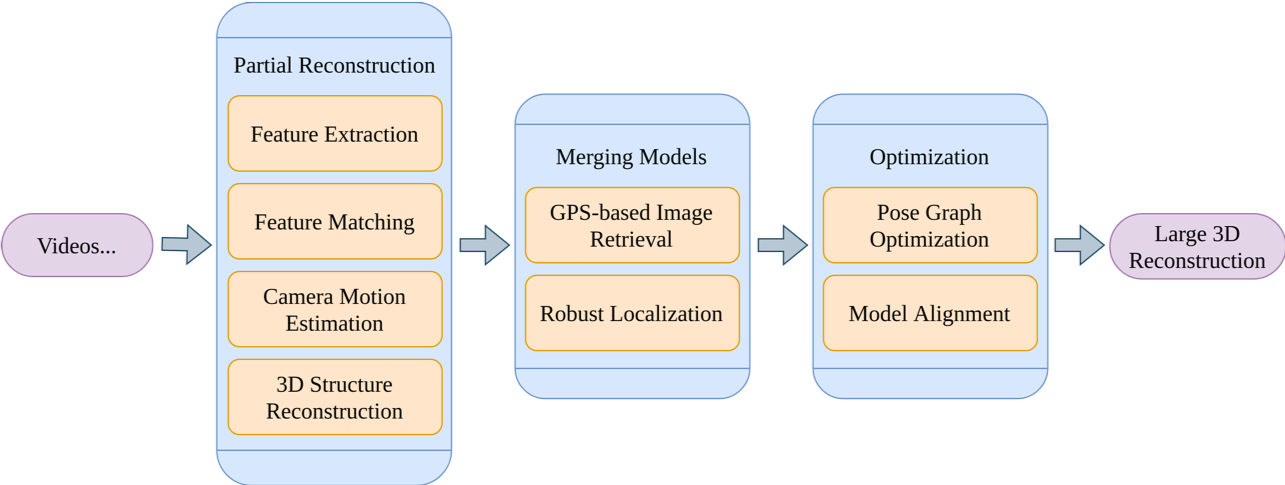
- Implemented scene reconstruction from videos based on Superpoint and Superglue;
- Designed an image pair retrieval strategy in large environments using GPS data;
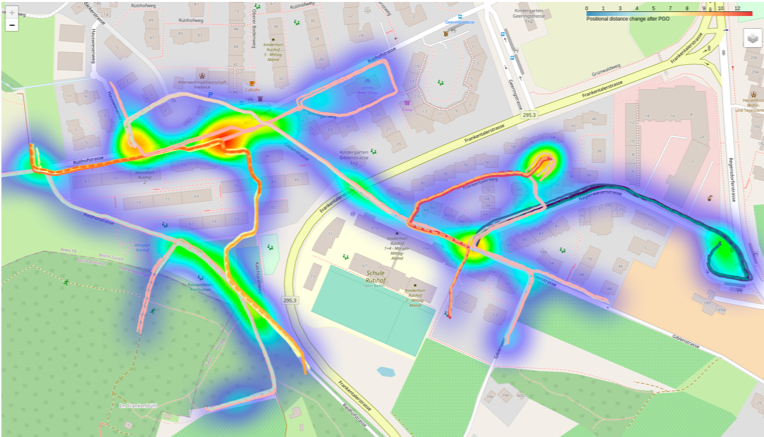
- Optimized the large scene reconstruction with Pose Graph Optimization.
Overview of our pipeline
Some visual results
Please find more details in the report.