
Learning Temporally Consistent 3D Robot Mapping
Weining Ren$^*$, Haoran Chen$^*$. Supervised by Dr. Lukas Schmid and Prof. Jen Jen Chung.
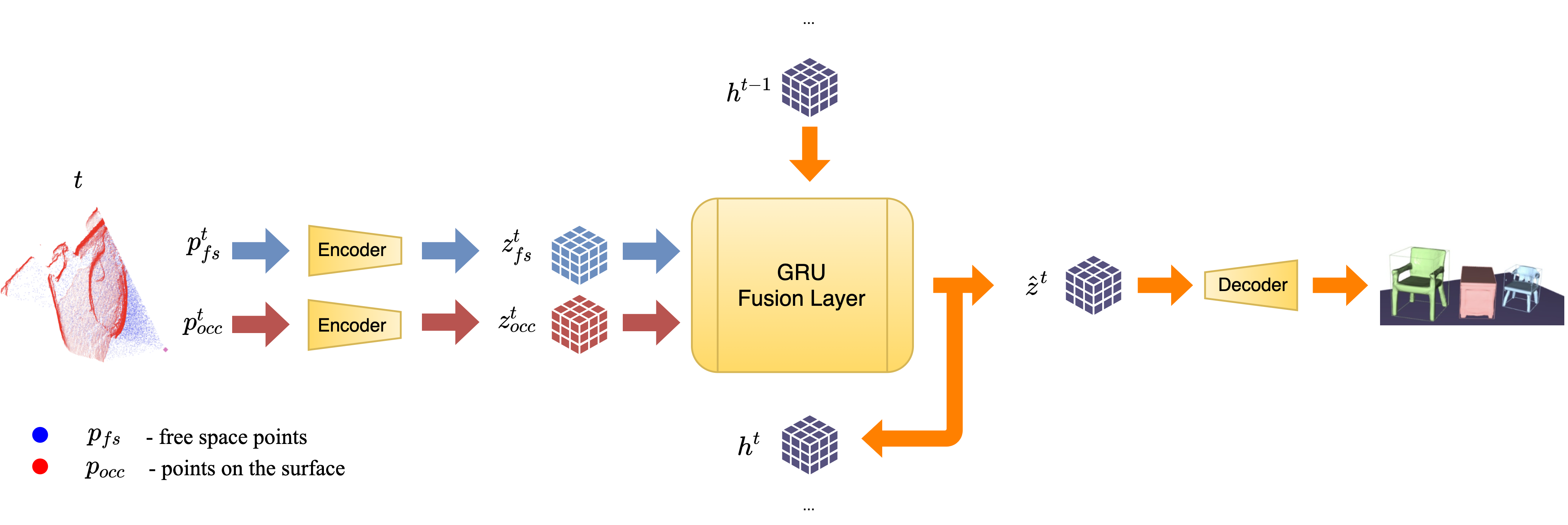
In this project, we developed a 3D GRU fusion layer based on NeuralBlox and proposed an observation memory function with free space encoding to capture temporal changes when mapping in a dynamic environment.
Main Contributions
- Proposed a 3D GRU fusion layer based on NeuralBlox to directly capture temporal changes in latent space when mapping in a dynamic environment;
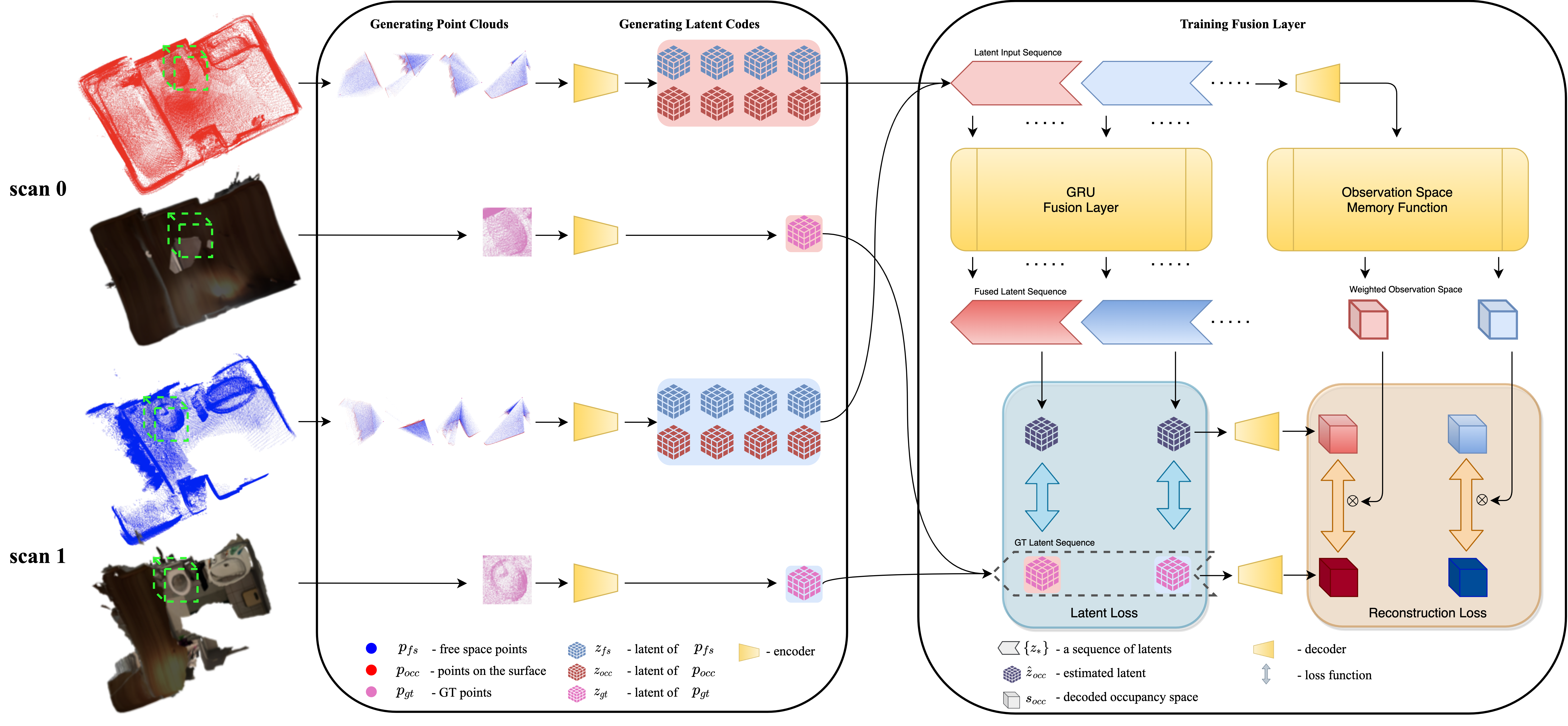
- Proposed a temporal attention mechanism using an observation space memory function;
- Designed a novel training strategy to use free space encoding.
Overview of our pipeline
Training strategy
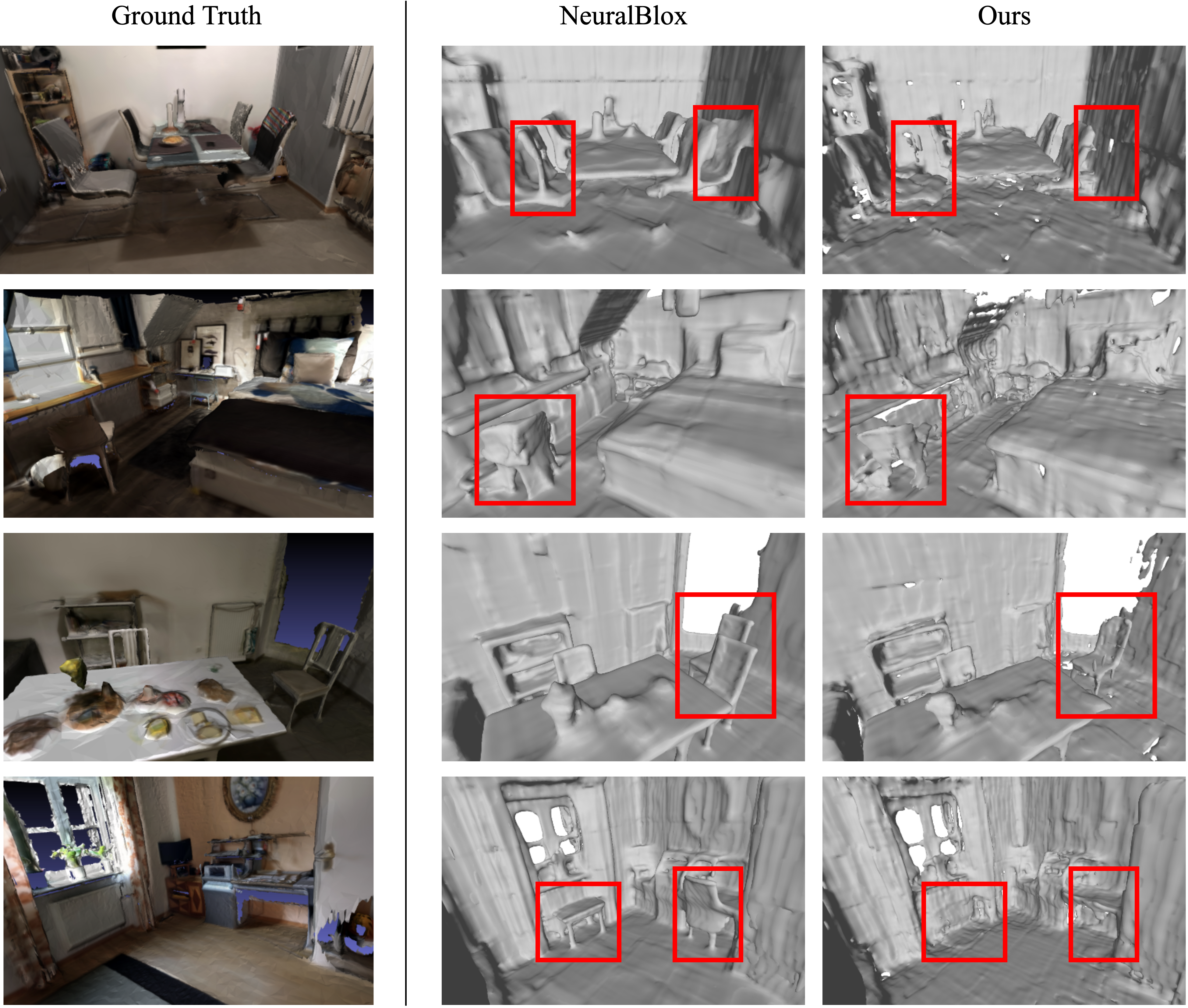
Qualitative results
Please find more details in our report.