
Homepage
Hi, I am Haoran Chen, currently a research associate at General Robotics Lab at Duke University, advised by Prof. Boyuan Chen.
Before that, I obtained my master degree (MS RSC) from ETH Zürich, where I mainly worked on 3D robot perception and scene understanding in Autonomous Systems Lab, supervised by Prof. Roland Siegwart. I had great pleasure doing research with Dr. Kenneth Blomqvist, Francesco Milano and Dr. Lukas Schmid.
Prior to ETH Zürich, I graduated from Huazhong University of Science and Technology with BS EE, where I worked on ML in FPGA advised by Prof. Donghong Zuo, and robot design advised by Prof. Yujiang Zeng.
✨ news ✨
[2024-07] Joined General Robotics Lab at Duke University
[2024-01] “Panoptic Vision-Language Feature Fields” is accepted by IEEE RAL.
Publication
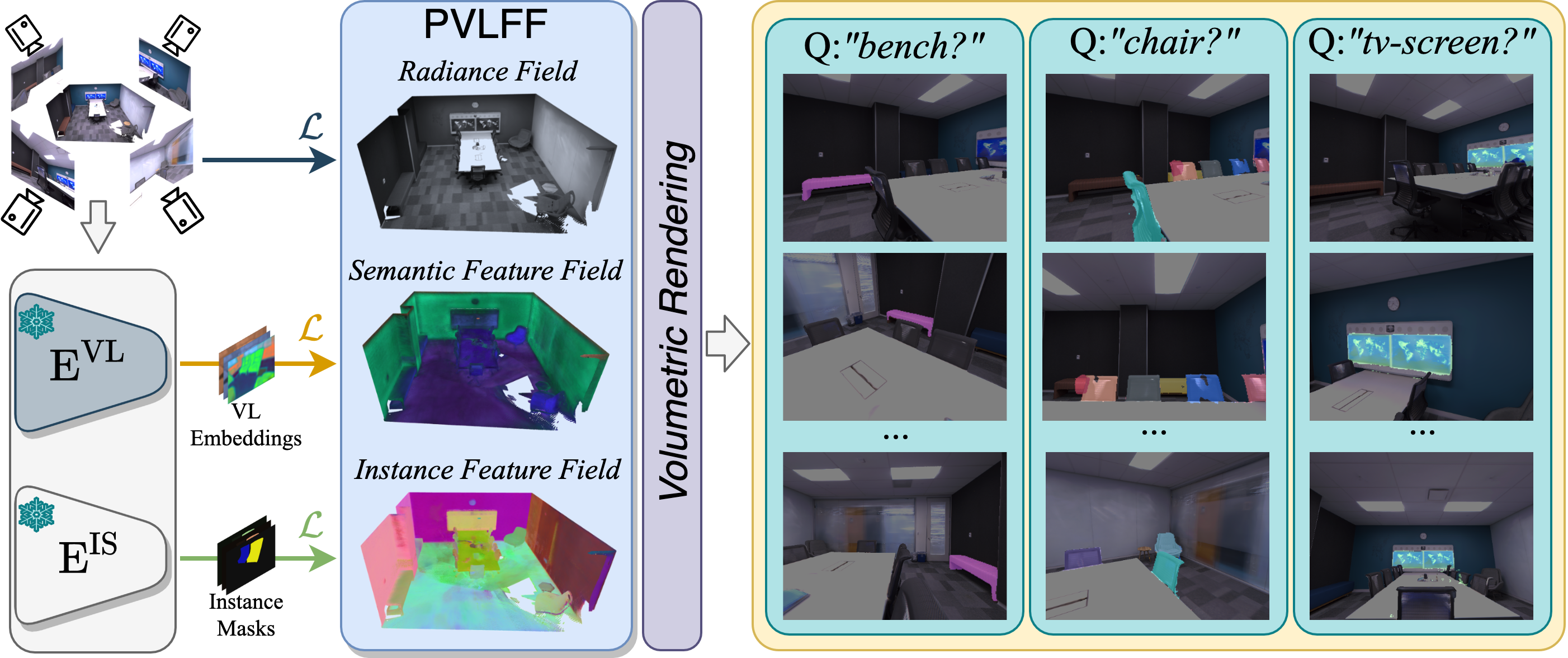
Panoptic Vision-Language Feature Fields
Haoran Chen, Kenneth Blomqvist, Francesco Milano and Roland Siegwart. "Panoptic Vision-Language Feature Fields." IEEE Robotics and Automation Letters. 2024
In this paper, we proposed a open-vocabulary panoptic system based on neural fields for scene understanding. Our method implicitly reconstructs the scene geometry from 2D images and simultaneously gains panoptic informaiton from 2D proposals computed by off-the-shelf 2D networks.
Course Projects
$^*$ denotes equal contribution.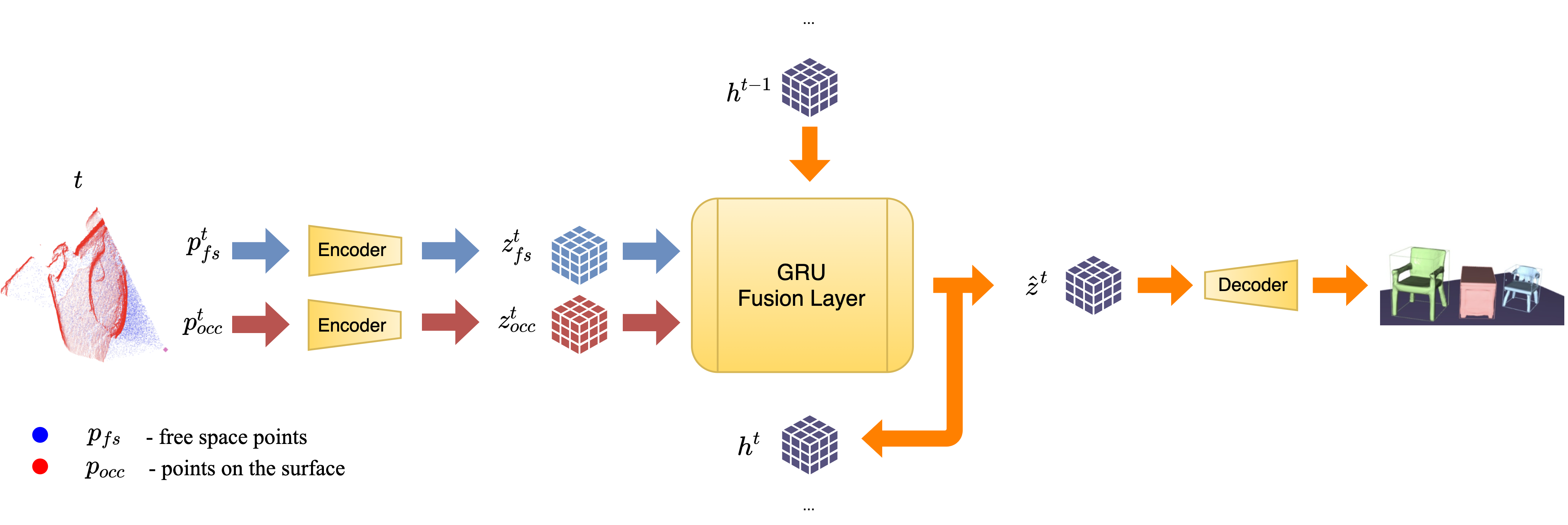
Learning Temporally Consistent 3D Robot Mapping
Weining Ren$^*$, Haoran Chen$^*$. Supervised by Dr. Lukas Schmid and Prof. Jen Jen Chung.
In this project, we developed a 3D GRU fusion layer based on NeuralBlox and proposed an observation memory function with free space encoding to capture temporal changes when mapping in a dynamic environment.
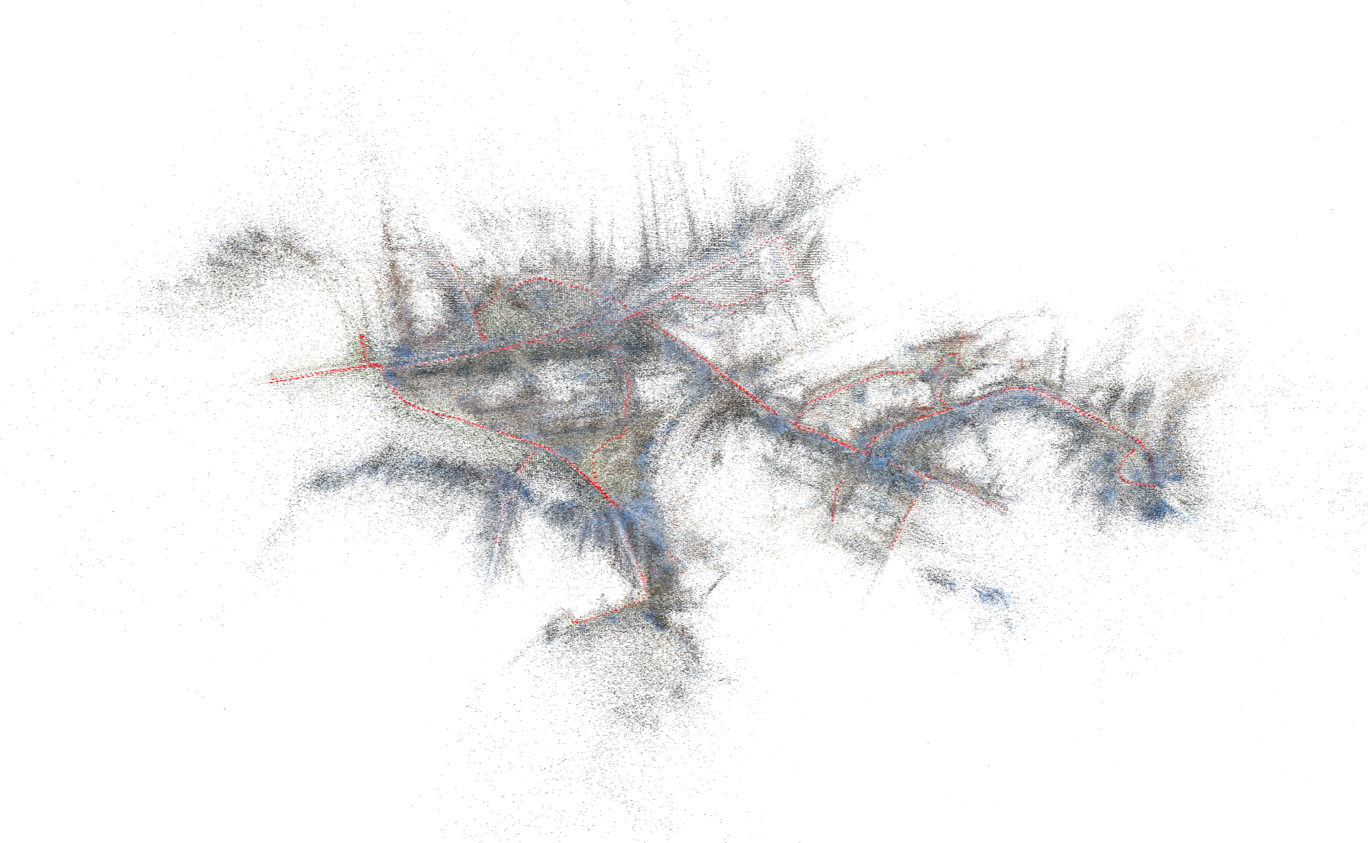
Large Scale 3D Reconstruction with GPS data
Haoran Chen. Supervised by Silvan Weder and Dr. Mihai Dusmanu.
In this project, we focused on recovering metric when using structure-from-motion, and proposed a GPS-based localization method to improve the retrieval efficiency and optimize large scale scene reconstruction.
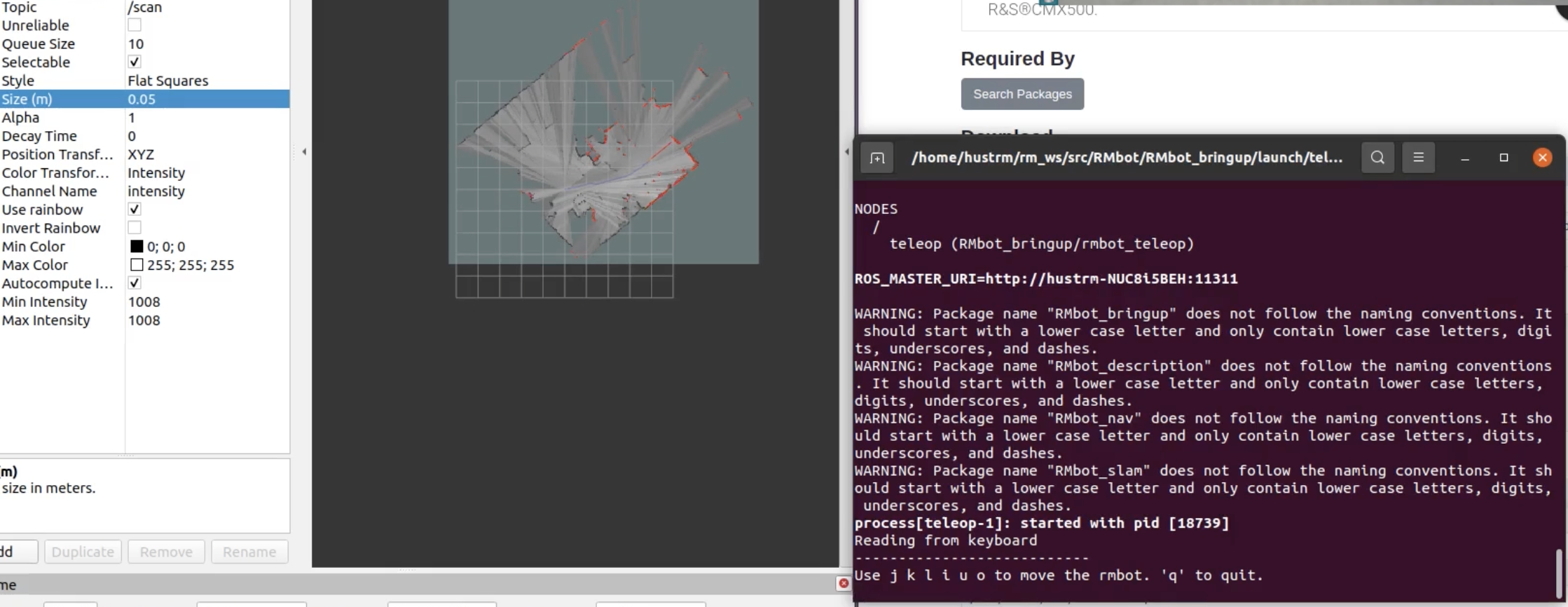
Haoran Chen. Supervised by Prof. Yujiang Zeng.
In this project, we designed and implemented a platform for a Mecanum wheeled mobile robot, including signal control of hardware units and logical control of ROS nodes with remote display. The system includes SLAM algorithms (gmapping and cartographer). We evaluated the mapping quality for indoor scenes.
Internship
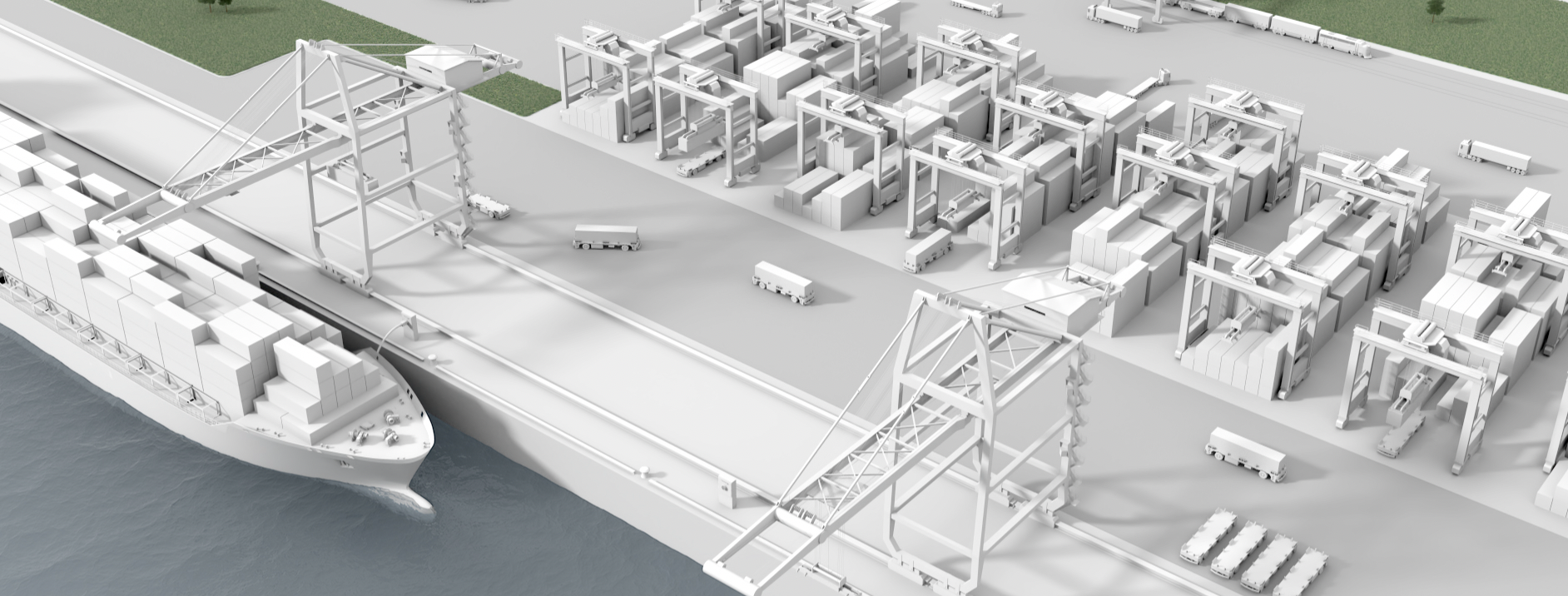
Towards detection of containers from 3D point clouds for automation of ship-to-shore (STS) cranes
Computer Vision and Machine Learning Intern at ABB Corporate Research Center. Supervised by Dr. Bruno Arsenali, Dr. Deran Maas and Dr. Stefano Maranò.
In this project, we build a fully autonomous perception system for smart container shipping by developing simulation platform for generation of synthetic point clouds, and machine learning algorithm for detection of containers from point clouds.
Competitions
$^*$ denotes equal contribution.
2019 OpenPOWER+OpenCAPI Heterogeneous Computing Design Contest
Zongyang Tong$^*$, Haoran Chen$^*$ and Jinhao Kuang$^*$. Supervised by Prof. Donghong Zuo.
Team won the Second Prize of National Finals. We designed the software and the convolution unit on hardware for computation acceleration, implemented the Meta-Pruning algorithm on Field Programmable Gate Arrays (FPGAs), and achieved an overall 23.5% speed increase of model inferring by using an FPGA+CPU hybrid operation mode.
Shuang Huang$^*$, Yue Pan$^*$ and Haoran Chen$^*$. Supervised by Prof. Jianbin Li.
Team was designated Finalist. We analyzed systematically the football matches from provided data for teaming strategies, and extracted the key factors that contributed to positive results of football matches and visualized our findings.